
LIDAR(レーザー)センサー搭載UAVを導入し、現在検証作業を行っています。
まずは河川で実測断面図が存在するエリアでデータ収集してみました。
30m高度でコース間40m程度、飛行速度は2m/s、レーザー入射角が45度程度としてコース間のサイドラップは約30%です。
自動航行はライチを使用しました。(飛行時間約10分)
以前からドローンの高度計の精度が心配だったのですが、予想通りの低精度でした。
PPKで自己位置の処理を行っているのですが、30mでの飛行予定に対して25mなので83%程度となっていました。また飛行中も高度は一定ではなく約2mの低下が見られます。今後はこの辺りを考慮しての高度設定が必用になります。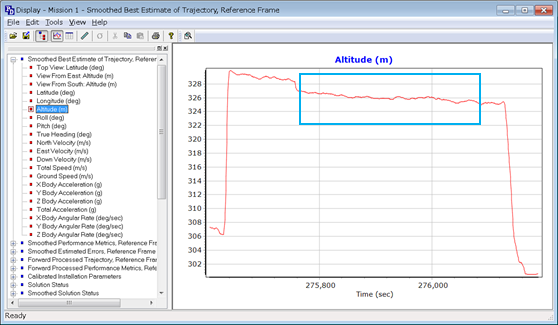
速度も検証してみましたがこちらは大きな誤差は見られませんでした。
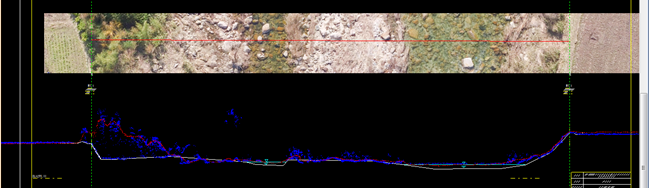
LIDARで取得した点群を反射強度で表示しています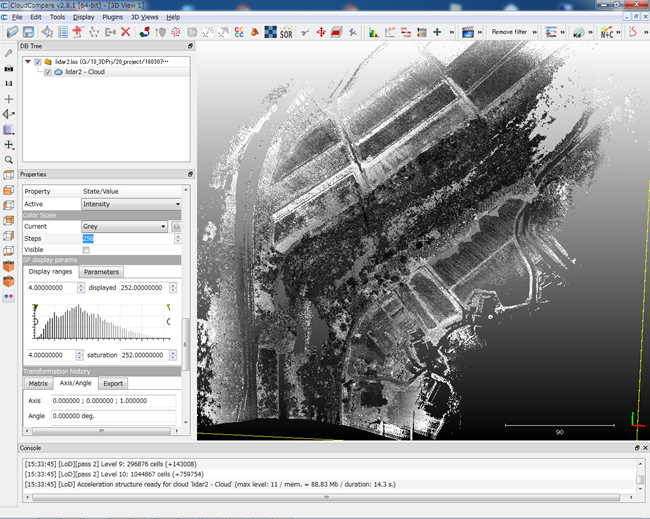
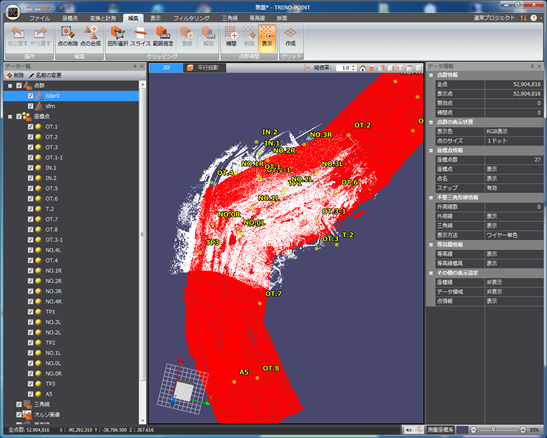
SFMでもデータ取得し、同時に表示しました(赤:SFM、白:LIDAR)
実測断面を取得した測点間において10㎝幅でデータを抽出しています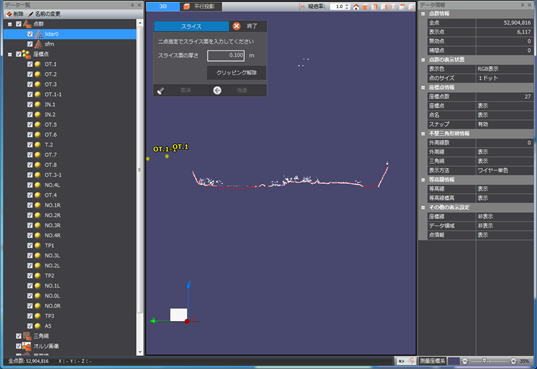
これらを実測断面図と重ねて比較しました(青:LIDAR 赤:SFM)
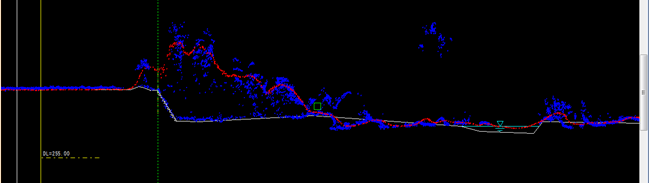

左岸側に雑草が大きく茂っていましたが、ある程度は地盤データを取得出来ています。
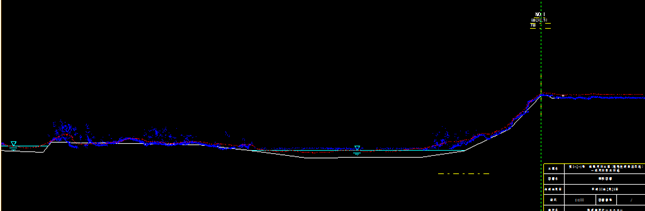
右岸側では遮るものが無く、断面方向が伐採されていたので綺麗に地盤データが取得できていました。
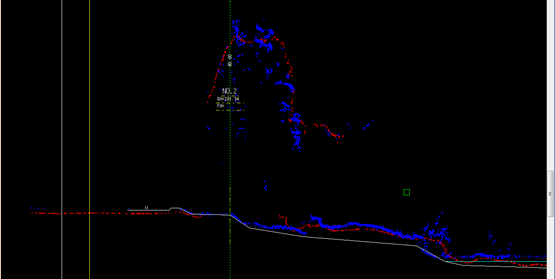

このように下草が茂っている場所では当然地盤データは取得できません。
今後も色々と検証を続けていきます。